Understanding Cheetahs’ Amazing Maneuverability Through Robotic Research
CLIENT
University of Cape Town
sector
Education
Read time
5 Min
Overview
The Challenge
The Solution
The Results
The numbers
The Challenge
“The cheetah is the pinnacle of maneuverability; understanding it compels us to devise new ways of measuring motion and force or performing optimization.” – Prof Amir Patel
Cheetahs’ extreme speed and agility have long fascinated scientists, yet detailed, accurate motion data in the wild was lacking. Conventional biomechanics methods were unsuitable for high-speed, noninvasive tracking in natural habitats. Prof Amir Patel and the African Robotics Unit (ARU) sought to uncover the mechanics of cheetahs’ tails, spines, and limbs during high-speed chases, with applications in robotics, conservation, sports science, and healthcare.
Challenges included:
Capturing full-body motion data from wild cheetahs without physical sensors or wearables.
Understanding the aerodynamic function of the tail and its role in maneuverability.
Integrating robotics-inspired methods into biological research to unlock new insights.
The Solution
With a Campus-Wide License for MATLAB® and Simulink®, Patel and his team developed WildPose, a deep learning–based, markerless motion capture system for studying cheetahs in the wild.
Key components included:
Modeling and Simulation: MATLAB and Simulink for biomechanical modeling of cheetah tails and bodies; Simscape Multibody™ for robotic simulations; Simulink Real-Time™ integrated with Speedgoat® for rapid testing and control.
Computer Vision: Use of DeepLabCut™ for noninvasive behavior tracking, combined with lidar and telescopic lenses for long-range 3D motion reconstruction.
Interoperability: Seamless integration with Python® and hardware platforms to accelerate development.
Robotics Prototypes: Creation of Baleka (bipedal robot) and Kemba (quadrupedal prototype) to test biomechanical hypotheses.
Collaboration with conservation centers and national parks allowed the ARU to collect high-speed data from both captive and wild cheetahs, ensuring real-world accuracy.
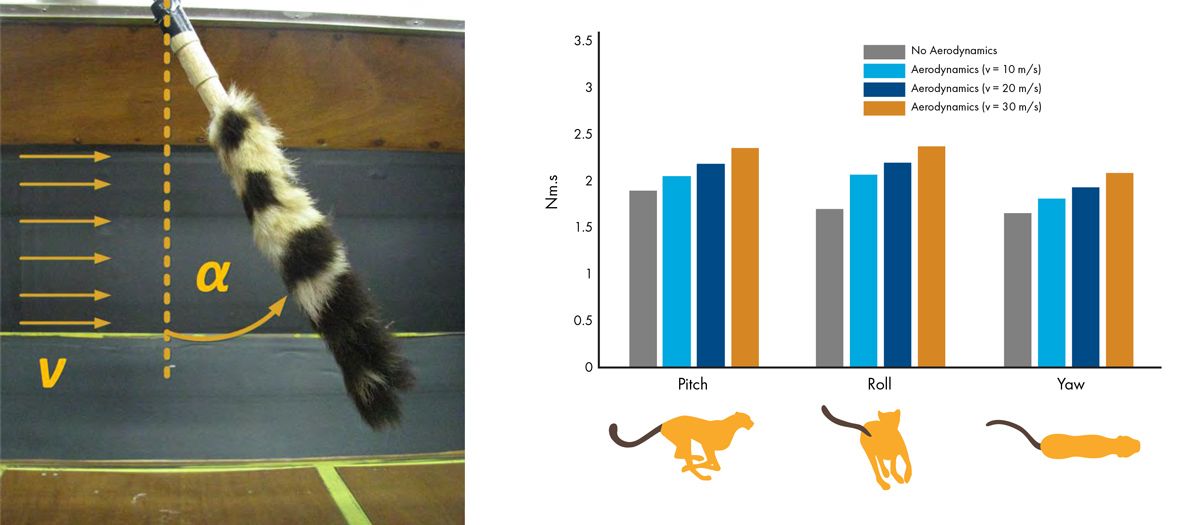
Cheetah tails were placed in a wind tunnel to understand the aerodynamic effects of the fur. (Image credit: Amir Patel)
The Outcome
The ARU’s research has produced significant impact:
Scientific & Technological Advances
Developed novel techniques in robotics, multibody modeling, trajectory optimization, and computer vision.
Two patents: a wearable motion capture system and a large-area 3D force plate system.
Published in high-impact journals, including a Nature Protocols cover feature.
Innovation in Robotics
Baleka and Kemba prototypes demonstrated high agility and jumping capability inspired by cheetah locomotion.
MATLAB and Simulink toolbox feedback from the ARU influenced new features in Computer Vision Toolbox™ and Lidar Toolbox™.
Cross-Disciplinary Applications
Potential uses in prosthetics, spinal cord injury rehabilitation, sports performance analysis, and wildlife conservation.
Enhanced understanding of cheetah maneuverability to support breeding and protection programs.
Over 13 years into the project, Patel continues to explore inverse reinforcement learning to answer the question: Is the cheetah optimizing for speed, energy efficiency, or maneuverability when it runs?
The legged robot Kemba. (Image credit: University of Cape Town, African Robotics Unit)








.png)

















.png)













.png)




